Kan UHF RFID bruges til højpræcisionspositionering?
Lad mig først give dig svaret. UHF RFID kan bruges til højpræcisionspositionering, men nøjagtigheden er omkring 1 meter.
UHF RFID bruges som positioneringsløsning. Kerneenheden er læseren ved hjælp af en phased array-antenne. Princippet om phased array antenne er beskrevet detaljeret i Gan Quans bog "UHF RFID Technology Products and Applications for the Internet of Things". Vi vil citere det relevante indhold.
Princip for Phased Array Antenne
Phase array-antenne, også kendt som phased array-antenne, refererer til en antenne, der ændrer formen på retningsmønsteret ved at styre fødefasen af den udstrålende enhed i array-antennen. Styring af fasen kan ændre retningen af den maksimale værdi af antenneretningsmønsteret for at opnå formålet med strålescanning. Det kan ganske enkelt forstås, at den traditionelle antenne kun har ét fast strålingsmønster, mens array-antennen kan have flere strålingsmønstre i forskellige retninger. Når en phased array-antenne bruges i en ultrahøj frekvens RFID system, kan en antenne omdannes til flere antenner i forskellige retninger. Den følgende figur viser strålingsdiagrammet for en gateway med en phased array-antenne. Den oprindelige antenne hovedsløjfe strålingsakse θ=0°. Efter at fasen af den specificerede strålingsenhed i array-antennen er justeret, vil hovedlobens strålingsakse afbøjes, og den maksimale afbøjning kan være 45°. Sammenlignet med den traditionelle løsning er dækningen af den fasede array-gateway ved hjælp af løsningen vist i nedenstående figur blevet kraftigt øget. Den oprindelige 3dB strålingsvinkel var 30°, og nu er den blevet 120°.
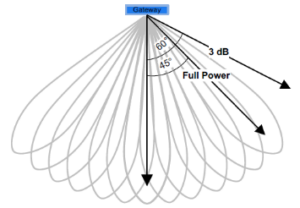
Phased array antenne gateway strålingsdiagram
Den specifikke drift af den fasede array-gateway kan forstås som en enkeltportslæser, der bliver en multiportlæser (hvor mange kombinationer af faser svarer til hvor mange porte). Den originale enkeltportslæser kan kun forbindes til én antenne, og strålingsområdet er fast, mens multiportlæseren kan tilsluttes mange antenner, og hver antenne har et forskelligt strålingsområde. Denne multi-port-læser kan vælge det område, der skal scannes i henhold til behovene og starte den tilsvarende port for at sende signalet gennem den tilsvarende antenne for at dække det specificerede område.
Phased array antenne positioneringsfunktion
Med hensyn til UHF's positioneringsfunktion RFID læsere, tag to almindelige phased array gateways på markedet: Impinj's xSpan og xArray som eksempler.
xArray er en firkantet array-gateway. Når xArray er hængt på taget, er dets dækningsområde en cirkel med i alt 8 sektorer og 52 strålingsområder. Det kan ganske enkelt forstås som en 52-ports læser forbundet til 52 antenner med forskellige strålingsområder.
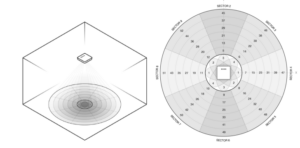
xArray strålemønster
xSpan er en rektangulær phased array gateway. xSpan-gatewayen kan ses som en forenklet version af xArray. Når xSpan er hængt på taget, er området, det dækker, et rektangel med i alt 13 strålingsområder. Det kan ganske enkelt forstås som en 13-ports læser forbundet til antenner i 13 forskellige strålingsområder.
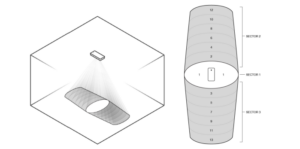
xSpan strålemønster
I det faktiske miljø overlapper strålingsområderne af tilstødende tal hinanden. Når det samme mærke er identificeret i flere nummererede strålingsområder, kan den specifikke placering af mærket beregnes ud fra RSSI-størrelsen. Beregningsprocessen er at konvertere RSSI-forskellen til afstandsforskellen og derefter implementere den gennem flerpunktspositioneringsalgoritmen. Selvfølgelig vil mærket sandsynligvis falde i strålingsområdet med den største RSSI-værdi.
Den største funktion af den fasede array-gateway er positionering, bedømmelse af objektets placering og bevægelse. Følgende figur viser tagbevægelsen, der kan spores af xSpan og xArray. Blandt dem kan xSpan kun spore tagbevægelsen i én akseretning, mens xArray kan spore tags, der bevæger sig i flere forskellige retninger.
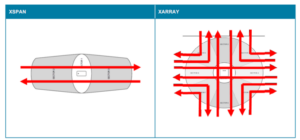
Phased array gateway retningssporing
For at sikre realtidssporing af objekter er det nødvendigt at sikre, at antenneomskiftningshastigheden er hurtig nok. Selvom omskiftningen er 50 ms hver gang, tager det 2,5 s at scanne alle strålingsområderne i xArray. Derfor bør antallet af tags i feltet garanteres ved anvendelse af objektsporing. Hvis højpræcisionssporing er påkrævet, bør antallet af tags ikke overstige 20; hvis højhastighedssporing skal opnås, bør antallet af tags ikke overstige 50.
I egentlige test er der visse fejl på grund af forskellige årsager. De målte data i et ideelt miljø uden okklusion og refleksion er: Der er en 85% sandsynlighedsfejl inden for 1,5 meter. Fejlen vil være større i komplekse miljøer, især i detailbutikker med hylde- og vægreflekser, samt stable- og placeringshøjden af tags, hvilket vil have stor indflydelse på testnøjagtigheden. Men sammenlignet med traditionelle teknologier forbedrer brugen af phased array gateways i høj grad nøjagtigheden og bekvemmeligheden ved objektplacering og -finding.
Optimeringen af positioneringsnøjagtigheden af forskerholdet fra Shanghai Jiaotong University afspejles hovedsageligt i algoritmeniveauet. I deres løsning skal de først læse faseinformationen for tag-reflektionssignalet gennem reader array-antennen fra producenter som Impinj og derefter optimere positioneringsalgoritmen baseret på faseinformationen.
Den positioneringsnøjagtighed på centimeterniveau, der er rapporteret i nyhederne før, er den effekt, der er opnået under relativt ideelle forhold. For at opnå en sådan nøjagtighed kræves der mange specifikke forhold. Hvis det er i et generelt miljø, baseret på optimering af algoritmen, er det et stort gennembrud at forbedre positioneringsnøjagtigheden af UHF RFID positioneringsløsningen fra omkring 1 meter til decimeterniveau.
Hvilke scenarier er egnede til UHF RFID højpræcisionspositionering
Positioneringsnøjagtigheden af UHF RFID er omkring 1m, hvilket også hører til kategorien højpræcisionspositioneringsteknologi. På nuværende tidspunkt er den trådløse positioneringsteknologi med den bedste positioneringsnøjagtighed på markedet UWB, som kan opnå positioneringsnøjagtighed på centimeterniveau i et ideelt miljø, men i faktiske applikationer vil det sandsynligvis være på decimeterniveau; mens positioneringsnøjagtigheden af Bluetooth AoA kun er meter-niveau, og nøjagtigheden af Bluetooths næste generations positioneringsteknologi "Channel Sounding" er også omkring 1m, så positioneringsnøjagtigheden af UHF RFID er ikke dårlig.