La RFID UHF peut-elle être utilisée pour un positionnement de haute précision ?
Laissez-moi d'abord vous donner la réponse. La RFID UHF peut être utilisée pour un positionnement de haute précision, mais la précision est d'environ 1 mètre.
La technologie RFID UHF est utilisée comme solution de positionnement. Le dispositif central est le lecteur utilisant une antenne réseau à commande de phase. Le principe de l'antenne réseau à commande de phase est décrit en détail dans le livre de Gan Quan « Produits et applications technologiques RFID UHF pour l'Internet des objets ». Nous citerons le contenu pertinent.
Principe de fonctionnement d'une antenne réseau à commande de phase
L'antenne réseau à phase, également connue sous le nom d'antenne réseau à commande de phase, fait référence à une antenne qui modifie la forme du diagramme directionnel en contrôlant la phase d'alimentation de l'unité rayonnante dans l'antenne réseau. Le contrôle de la phase peut modifier la direction de la valeur maximale du diagramme directionnel de l'antenne pour atteindre l'objectif de balayage du faisceau. On peut simplement comprendre que l'antenne traditionnelle n'a qu'un seul diagramme de rayonnement fixe, tandis que l'antenne réseau peut avoir plusieurs diagrammes de rayonnement dans différentes directions. Lorsqu'une antenne réseau à commande de phase est utilisée dans une fréquence ultra-élevée Système RFID, une antenne peut être transformée en plusieurs antennes dans différentes directions. La figure suivante montre le diagramme de rayonnement d'une passerelle avec une antenne réseau à commande de phase. L'axe de rayonnement du lobe principal de l'antenne d'origine θ=0°. Une fois la phase de l'unité de rayonnement spécifiée dans l'antenne réseau ajustée, l'axe de rayonnement du lobe principal se déformera et la déflexion maximale peut être de 45°. Par rapport à la solution traditionnelle, la couverture de la passerelle à commande de phase utilisant la solution illustrée dans la figure ci-dessous a été considérablement augmentée. L'angle de rayonnement de 3 dB d'origine était de 30°, et il est maintenant de 120°.
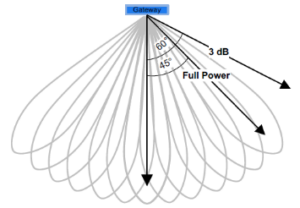
Diagramme de rayonnement de la passerelle d'antenne à réseau phasé
Le fonctionnement spécifique de la passerelle à réseau phasé peut être compris comme un lecteur à port unique devenant un lecteur à ports multiples (combien de combinaisons de phases correspondent à combien de ports). Le lecteur à port unique d'origine ne peut se connecter qu'à une seule antenne et la portée de rayonnement est fixe, tandis que le lecteur à ports multiples peut se connecter à de nombreuses antennes et chaque antenne a une portée de rayonnement différente. Ce lecteur à ports multiples peut sélectionner la zone à scanner en fonction des besoins et démarrer le port correspondant pour transmettre le signal via l'antenne correspondante afin de couvrir la zone spécifiée.
Fonction de positionnement d'antenne à réseau phasé
Concernant la fonction de positionnement de l'UHF Lecteurs RFID, prenons deux passerelles à réseau phasé courantes sur le marché : xSpan et xArray d'Impinj comme exemples.
xArray est une passerelle à réseau phasé de forme carrée. Lorsque le xArray est suspendu au toit, sa zone de couverture est un cercle, avec un total de 8 secteurs et 52 zones de rayonnement. Il peut être simplement compris comme un lecteur à 52 ports connecté à 52 antennes avec différentes zones de rayonnement.
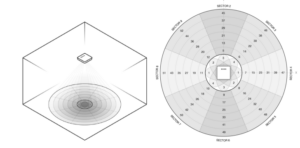
Motif de faisceau xArray
xSpan est une passerelle à réseau phasé rectangulaire. La passerelle xSpan peut être considérée comme une version simplifiée du xArray. Lorsque le xSpan est accroché au toit, la zone qu'il couvre est un rectangle avec un total de 13 zones de rayonnement. Il peut être simplement compris comme un lecteur à 13 ports connecté à des antennes dans 13 zones de rayonnement différentes.
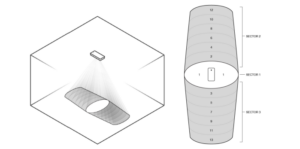
Motif de poutre xSpan
Dans l'environnement réel, les zones de rayonnement des nombres adjacents se chevauchent. Lorsque la même balise est identifiée dans plusieurs zones de rayonnement numérotées, l'emplacement spécifique de la balise peut être calculé par la taille RSSI. Le processus de calcul consiste à convertir la différence RSSI en différence de distance, puis à l'implémenter via l'algorithme de positionnement multipoint. Bien entendu, la balise est susceptible de tomber dans la zone de rayonnement avec la plus grande valeur RSSI.
La fonction principale de la passerelle à réseau phasé est le positionnement, l'évaluation de l'emplacement et du mouvement de l'objet. La figure suivante montre le mouvement des balises qui peut être suivi par xSpan et xArray. Parmi eux, xSpan ne peut suivre le mouvement des balises que dans une direction d'axe, tandis que xArray peut suivre les balises se déplaçant dans plusieurs directions différentes.
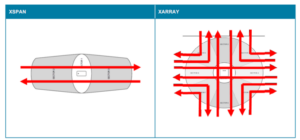
Suivi de direction de passerelle à réseau phasé
Afin de garantir le suivi en temps réel des objets, il est nécessaire de veiller à ce que la vitesse de commutation de l'antenne soit suffisamment rapide. Même si la commutation est de 50 ms à chaque fois, il faut 2,5 s pour balayer toutes les zones de rayonnement du xArray. Par conséquent, dans l'application du suivi d'objets, le nombre d'étiquettes sur le terrain doit être garanti. Si un suivi de haute précision est requis, le nombre d'étiquettes ne doit pas dépasser 20 ; si un suivi à grande vitesse doit être obtenu, le nombre d'étiquettes ne doit pas dépasser 50.
Lors des tests réels, certaines erreurs peuvent survenir pour diverses raisons. Les données mesurées dans un environnement idéal sans occlusion ni réflexion sont les suivantes : il existe une erreur de probabilité 85% dans un rayon de 1,5 mètre. L'erreur sera plus importante dans des environnements complexes, en particulier dans les magasins de détail avec des réflexions sur les étagères et les murs, ainsi que la hauteur d'empilage et de placement des étiquettes, ce qui aura un impact important sur la précision du test. Cependant, par rapport aux technologies traditionnelles, l'utilisation de passerelles à réseau phasé améliore considérablement la précision et la commodité du positionnement et de la recherche d'objets.
L'optimisation de la précision de positionnement par l'équipe de recherche de l'Université Jiaotong de Shanghai se reflète principalement au niveau de l'algorithme. Dans leur solution, ils doivent d'abord lire les informations de phase du signal de réflexion de l'étiquette via l'antenne réseau de lecture de fabricants tels qu'Impinj, puis optimiser l'algorithme de positionnement en fonction des informations de phase.
La précision de positionnement au centimètre près, évoquée dans les articles précédents, est l'effet obtenu dans des conditions relativement idéales. Pour atteindre une telle précision, de nombreuses conditions spécifiques sont nécessaires. Si c'est dans un environnement général, sur la base de l'optimisation de l'algorithme, il s'agit d'une avancée majeure pour améliorer la précision de positionnement de la solution de positionnement RFID UHF d'environ 1 mètre au niveau décimétrique.
Quels scénarios sont adaptés au positionnement de haute précision UHF RFID
La précision de positionnement de la RFID UHF est d'environ 1 m, ce qui appartient également à la catégorie des technologies de positionnement de haute précision. À l'heure actuelle, la technologie de positionnement sans fil avec la meilleure précision de positionnement sur le marché est l'UWB, qui peut atteindre une précision de positionnement au centimètre près dans un environnement idéal, mais dans les applications réelles, elle est susceptible d'être au décimètre ; tandis que la précision de positionnement du Bluetooth AoA n'est que de l'ordre du mètre, et la précision de la technologie de positionnement de nouvelle génération de Bluetooth « Channel Sounding » est également d'environ 1 m, donc la précision de positionnement de la RFID UHF n'est pas mauvaise.