UHF RFID를 고정밀 위치 지정에 사용할 수 있나요?
먼저 답을 드리겠습니다. UHF RFID는 고정밀 위치 지정에 사용할 수 있지만 정확도는 약 1미터입니다.
UHF RFID는 위치 솔루션으로 사용됩니다. 핵심 장치는 위상 배열 안테나를 사용하는 리더입니다. 위상 배열 안테나의 원리는 Gan Quan의 저서 "UHF RFID 기술 제품 및 사물 인터넷 응용 프로그램"에 자세히 설명되어 있습니다. 관련 내용을 인용하겠습니다.
위상 배열 안테나의 원리
위상 배열 안테나는 위상 배열 안테나라고도 하며, 배열 안테나에서 방사 유닛의 급전 위상을 제어하여 방향 패턴의 모양을 변경하는 안테나를 말합니다. 위상을 제어하면 빔 스캐닝의 목적을 달성하기 위해 안테나 방향 패턴의 최대값의 방향을 변경할 수 있습니다. 기존 안테나는 고정된 방사 패턴이 하나뿐인 반면 배열 안테나는 다른 방향으로 여러 방사 패턴을 가질 수 있다는 것을 간단히 이해할 수 있습니다. 위상 배열 안테나가 초고주파에서 사용될 때 RFID 시스템, 하나의 안테나는 다른 방향의 여러 안테나로 변환될 수 있습니다. 다음 그림은 위상 배열 안테나가 있는 게이트웨이의 방사 다이어그램을 보여줍니다. 원래 안테나 주 로브 방사 축 θ=0°. 배열 안테나에서 지정된 방사 유닛의 위상이 조정된 후 주 로브 방사 축이 편향되고 최대 편향은 45°가 될 수 있습니다. 기존 솔루션과 비교하여 아래 그림에 표시된 솔루션을 사용하는 위상 배열 게이트웨이의 적용 범위가 크게 증가했습니다. 원래 3dB 방사 각도는 30°였지만 지금은 120°가 되었습니다.
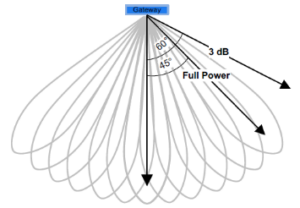
위상 배열 안테나 게이트웨이 방사 다이어그램
위상 배열 게이트웨이의 구체적인 작동은 단일 포트 리더가 다중 포트 리더가 되는 것으로 이해할 수 있습니다(위상의 조합이 포트 수에 해당하는 수). 원래 단일 포트 리더는 하나의 안테나에만 연결할 수 있고 방사 범위는 고정되어 있지만 다중 포트 리더는 여러 안테나에 연결할 수 있으며 각 안테나는 다른 방사 범위를 갖습니다. 이 다중 포트 리더는 필요에 따라 스캔할 영역을 선택하고 해당 포트를 시작하여 해당 안테나를 통해 신호를 전송하여 지정된 영역을 커버할 수 있습니다.
위상배열 안테나 위치 결정 기능
UHF의 위치기능에 대하여 RFID 리더시중에 판매되는 두 가지 일반적인 위상 배열 게이트웨이인 Impinj의 xSpan과 xArray를 예로 들어보겠습니다.
xArray는 정사각형 위상 배열 게이트웨이입니다. xArray를 지붕에 걸면 커버리지 영역은 원형이며 총 8개의 섹터와 52개의 방사 영역이 있습니다. 간단히 말해 방사 영역이 다른 52개의 안테나에 연결된 52포트 리더로 이해할 수 있습니다.
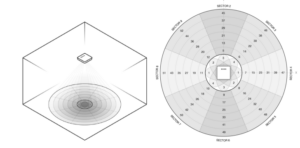
xArray 빔 패턴
xSpan은 직사각형 위상 배열 게이트웨이입니다. xSpan 게이트웨이는 xArray의 단순화된 버전으로 볼 수 있습니다. xSpan을 지붕에 걸면 덮는 면적은 총 13개의 방사 영역이 있는 직사각형입니다. 간단히 13개의 다른 방사 영역에 있는 안테나에 연결된 13포트 리더로 이해할 수 있습니다.
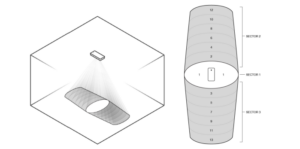
xSpan 빔 패턴
실제 환경에서는 인접한 숫자의 방사 영역이 서로 겹칩니다. 여러 개의 번호가 매겨진 방사 영역에서 동일한 태그가 식별되면 RSSI 크기로 태그의 구체적인 위치를 계산할 수 있습니다. 계산 과정은 RSSI 차이를 거리 차이로 변환한 다음 다중 지점 위치 지정 알고리즘을 통해 구현하는 것입니다. 물론 태그는 RSSI 값이 가장 큰 방사 영역에 속할 가능성이 높습니다.
위상 배열 게이트웨이의 가장 큰 기능은 위치 지정, 객체의 위치와 움직임을 판단하는 것입니다. 다음 그림은 xSpan과 xArray가 추적할 수 있는 태그 이동을 보여줍니다. 그 중 xSpan은 한 축 방향으로만 태그 이동을 추적할 수 있는 반면, xArray는 여러 다른 방향으로 이동하는 태그를 추적할 수 있습니다.
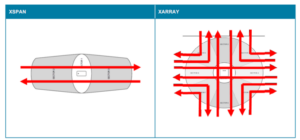
위상 배열 게이트웨이 방향 추적
실시간 객체 추적을 보장하기 위해서는 안테나 스위칭 속도가 충분히 빠른지 확인해야 합니다. 스위칭이 매번 50ms이더라도 xArray의 모든 복사 영역을 스캔하는 데 2.5초가 걸립니다. 따라서 객체 추적을 적용할 때는 현장의 태그 수를 보장해야 합니다. 고정밀 추적이 필요한 경우 태그 수는 20개를 초과해서는 안 됩니다. 고속 추적을 달성하려면 태그 수가 50개를 초과해서는 안 됩니다.
실제 테스트에서는 다양한 이유로 특정 오류가 있습니다. 폐색 및 반사가 없는 이상적인 환경에서 측정된 데이터는 1.5m 이내에 85% 확률 오류가 있습니다. 오류는 복잡한 환경, 특히 선반 및 벽 반사가 있는 소매점과 태그의 쌓기 및 배치 높이에서 더 커질 것이며, 이는 테스트 정확도에 큰 영향을 미칩니다. 그러나 기존 기술과 비교할 때 위상 배열 게이트웨이를 사용하면 객체 위치 지정 및 찾기의 정확도와 편의성이 크게 향상됩니다.
상하이 교통대 연구팀의 위치 정확도 최적화는 주로 알고리즘 수준에서 반영됩니다. 그들의 솔루션에서 그들은 먼저 Impinj와 같은 제조업체의 리더 어레이 안테나를 통해 태그 반사 신호의 위상 정보를 읽은 다음 위상 정보를 기반으로 위치 알고리즘을 최적화해야 합니다.
이전에 뉴스에서 보도한 센티미터 수준의 위치 정확도는 비교적 이상적인 조건에서 달성한 효과입니다. 이러한 정확도를 달성하려면 많은 특정 조건이 필요합니다. 일반적인 환경이라면 알고리즘 최적화를 기반으로 UHF RFID 위치 솔루션의 위치 정확도를 약 1미터에서 데시미터 수준으로 개선하는 것은 큰 돌파구입니다.
UHF RFID 고정밀 위치 지정에 적합한 시나리오는 무엇입니까?
UHF RFID의 위치 정확도는 약 1m로 고정밀 위치 기술 범주에 속합니다. 현재 시장에서 가장 좋은 위치 정확도를 가진 무선 위치 기술은 UWB로 이상적인 환경에서는 센티미터 수준의 위치 정확도를 달성할 수 있지만 실제 응용 프로그램에서는 데시미터 수준이 될 가능성이 높습니다. 반면 Bluetooth AoA의 위치 정확도는 미터 수준에 불과하고 Bluetooth의 차세대 위치 기술인 "채널 사운딩"의 정확도도 약 1m이므로 UHF RFID의 위치 정확도는 나쁘지 않습니다.