Ar UHF RFID gali būti naudojamas didelio tikslumo padėties nustatymui?
Pirmiausia leiskite man atsakyti. UHF RFID gali būti naudojamas didelio tikslumo padėties nustatymui, tačiau tikslumas yra apie 1 metrą.
UHF RFID naudojamas kaip padėties nustatymo sprendimas. Pagrindinis įrenginys yra skaitytuvas, naudojantis fazinę masyvo anteną. Fazinės matricos antenos principas yra išsamiai aprašytas Gan Quan knygoje „UHF RFID technologijos produktai ir taikymas daiktų internetui“. Mes pacituosime atitinkamą turinį.
Fazinės matricos antenos principas
Fazinė matricos antena, taip pat žinoma kaip fazinė matricos antena, reiškia anteną, kuri keičia krypties modelio formą, valdydama masyvo antenoje esančio spinduliavimo įrenginio maitinimo fazę. Fazės valdymas gali pakeisti didžiausios antenos krypties modelio vertės kryptį, kad būtų pasiektas pluošto skenavimo tikslas. Galima paprasčiausiai suprasti, kad tradicinė antena turi tik vieną fiksuotą spinduliuotės modelį, o masyvo antena gali turėti kelis spinduliavimo modelius skirtingomis kryptimis. Kai fazinio matricos antena naudojama itin aukštu dažniu RFID sistema, viena antena gali būti transformuota į kelias antenas skirtingomis kryptimis. Toliau pateiktame paveikslėlyje parodyta šliuzo su fazinės matricos antena spinduliavimo diagrama. Originali antenos pagrindinės skilties spinduliavimo ašis θ=0°. Sureguliavus nurodyto spinduliavimo bloko fazę matricos antenoje, pagrindinė skilties spinduliavimo ašis pasisuks, o didžiausias nuokrypis gali būti 45°. Palyginti su tradiciniu sprendimu, fazinio masyvo šliuzo aprėptis, naudojant toliau pateiktame paveikslėlyje parodytą sprendimą, buvo žymiai padidinta. Pradinis 3dB spinduliavimo kampas buvo 30°, o dabar tapo 120°.
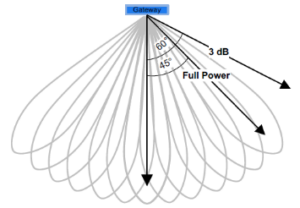
Fazinio matricos antenos šliuzo spinduliavimo diagrama
Konkrečią fazinio masyvo šliuzo veikimą galima suprasti kaip vieno prievado skaitytuvą, kuris tampa kelių prievadų skaitytuvu (kiek fazių derinių atitinka kiek prievadų). Originalus vieno prievado skaitytuvas gali prisijungti tik prie vienos antenos, o spinduliavimo diapazonas yra fiksuotas, o kelių prievadų skaitytuvas gali prisijungti prie daugelio antenų, o kiekviena antena turi skirtingą spinduliavimo diapazoną. Šis kelių prievadų skaitytuvas gali pasirinkti skenuojamą sritį pagal poreikius ir paleisti atitinkamą prievadą, kad signalas būtų perduotas per atitinkamą anteną, kad apimtų nurodytą sritį.
Fazinio matricos antenos padėties nustatymo funkcija
Dėl UHF padėties nustatymo funkcijos RFID skaitytuvai, paimkite du įprastus fazinio masyvo šliuzus rinkoje: Impinj's xSpan ir xArray kaip pavyzdžius.
xArray yra kvadratinis fazinis masyvo šliuzas. Kai xArray yra pakabintas ant stogo, jo aprėpties plotas yra apskritimas, kuriame iš viso yra 8 sektoriai ir 52 spinduliavimo zonos. Tai galima paprasčiausiai suprasti kaip 52 prievadų skaitytuvą, prijungtą prie 52 antenų, turinčių skirtingas spinduliavimo sritis.
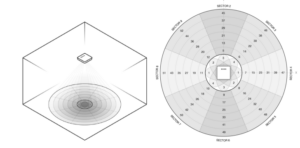
xArray pluošto modelis
xSpan yra stačiakampio fazinio masyvo šliuzas. „xSpan“ šliuzas gali būti vertinamas kaip supaprastinta „xArray“ versija. Kai xSpan pakabinamas ant stogo, jo uždengtas plotas yra stačiakampis, kuriame iš viso yra 13 spinduliavimo sričių. Tai galima paprasčiausiai suprasti kaip 13 prievadų skaitytuvą, prijungtą prie antenų 13 skirtingų spinduliavimo sričių.
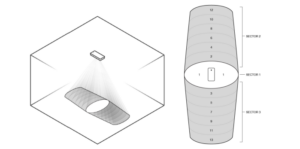
xSpan sijos raštas
Faktinėje aplinkoje gretimų skaičių spinduliuotės sritys persidengia viena su kita. Kai ta pati žyma identifikuojama keliose sunumeruotose spinduliuotės srityse, konkrečią žymos vietą galima apskaičiuoti pagal RSSI dydį. Skaičiavimo procesas yra konvertuoti RSSI skirtumą į atstumo skirtumą ir tada jį įgyvendinti naudojant kelių taškų padėties nustatymo algoritmą. Žinoma, žyma greičiausiai nukris spinduliavimo srityje, kurios RSSI vertė yra didžiausia.
Didžiausia fazinio masyvo šliuzo funkcija yra padėties nustatymas, objekto vietos ir judėjimo įvertinimas. Toliau pateiktame paveikslėlyje parodytas žymos judėjimas, kurį galima stebėti naudojant xSpan ir xArray. Iš jų xSpan gali sekti tik žymos judėjimą viena ašies kryptimi, o xArray gali sekti žymes, judančias keliomis skirtingomis kryptimis.
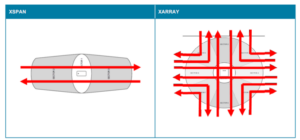
Fazinis masyvo šliuzo krypties stebėjimas
Norint užtikrinti objektų sekimą realiu laiku, būtina užtikrinti, kad antenos perjungimo greitis būtų pakankamai didelis. Net jei perjungimas kiekvieną kartą yra 50 ms, reikia 2,5 s nuskaityti visas xArray spinduliavimo sritis. Todėl, taikant objektų sekimą, lauke turėtų būti garantuotas žymių skaičius. Jei reikalingas didelio tikslumo stebėjimas, žymų skaičius neturėtų viršyti 20; jei reikia pasiekti greitą sekimą, žymų skaičius neturėtų viršyti 50.
Tikruose bandymuose dėl įvairių priežasčių atsiranda tam tikrų klaidų. Išmatuoti duomenys idealioje aplinkoje be okliuzijos ir atspindžio: 1,5 metro ribose yra 85% tikimybės paklaida. Klaida bus didesnė sudėtingoje aplinkoje, ypač mažmeninės prekybos parduotuvėse su lentynų ir sienų atspindžiais, taip pat dėl etikečių sudėjimo ir išdėstymo aukščio, o tai turės didelę įtaką bandymo tikslumui. Tačiau, palyginti su tradicinėmis technologijomis, fazinių masyvo šliuzų naudojimas žymiai pagerina objektų padėties nustatymo ir radimo tikslumą ir patogumą.
Šanchajaus Jiaotong universiteto tyrimų grupės optimizuotas padėties nustatymo tikslumas daugiausia atsispindi algoritmo lygyje. Savo sprendimu jie pirmiausia turi perskaityti žymos atspindžio signalo fazės informaciją per gamintojų, tokių kaip Impinj, skaitytuvo matricos anteną, o tada optimizuoti padėties nustatymo algoritmą, pagrįstą fazės informacija.
Anksčiau naujienose aprašytas centimetro lygio padėties nustatymo tikslumas yra efektas, pasiektas palyginti idealiomis sąlygomis. Norint pasiekti tokį tikslumą, reikia daug konkrečių sąlygų. Jei tai yra bendroje aplinkoje, remiantis algoritmo optimizavimu, tai yra didelis laimėjimas siekiant pagerinti UHF RFID padėties nustatymo sprendimo tikslumą nuo maždaug 1 metro iki decimetro lygio.
Kokie scenarijai tinka UHF RFID didelio tikslumo padėties nustatymui
UHF RFID padėties nustatymo tikslumas yra apie 1 m, kuris taip pat priklauso didelio tikslumo padėties nustatymo technologijos kategorijai. Šiuo metu belaidė padėties nustatymo technologija, pasižyminti geriausiu padėties nustatymo tikslumu rinkoje, yra UWB, kuri gali pasiekti centimetro lygio padėties nustatymo tikslumą idealioje aplinkoje, tačiau tikrosiose programose ji greičiausiai bus decimetro lygio; tuo tarpu „Bluetooth AoA“ padėties nustatymo tikslumas yra tik metro lygyje, o „Bluetooth“ naujos kartos padėties nustatymo technologijos „Channel Sounding“ tikslumas taip pat yra apie 1 m, todėl UHF RFID padėties nustatymo tikslumas nėra blogas.