Kan UHF RFID worden gebruikt voor uiterst nauwkeurige positionering?
Laat me je eerst het antwoord geven. UHF RFID kan worden gebruikt voor zeer nauwkeurige positionering, maar de nauwkeurigheid is ongeveer 1 meter.
UHF RFID wordt gebruikt als positioneringsoplossing. Het kernapparaat is de lezer die een phased array-antenne gebruikt. Het principe van de phased array-antenne wordt gedetailleerd beschreven in Gan Quan's boek "UHF RFID Technology Products and Applications for the Internet of Things". We zullen de relevante inhoud citeren.
Principe van een gefaseerde array-antenne
Phase array-antenne, ook bekend als phased array-antenne, verwijst naar een antenne die de vorm van het richtingspatroon verandert door de voedingsfase van de stralingseenheid in de array-antenne te regelen. Door de fase te regelen, kan de richting van de maximale waarde van het richtingspatroon van de antenne worden gewijzigd om het doel van beam scanning te bereiken. Het kan eenvoudig worden begrepen dat de traditionele antenne slechts één vast stralingspatroon heeft, terwijl de array-antenne meerdere stralingspatronen in verschillende richtingen kan hebben. Wanneer een phased array-antenne wordt gebruikt in een ultrahoge frequentie RFID-systeem, kan één antenne worden getransformeerd in meerdere antennes in verschillende richtingen. De volgende afbeelding toont het stralingsdiagram van een gateway met een phased array-antenne. De oorspronkelijke antenne hoofdlob stralingsas θ=0°. Nadat de fase van de opgegeven stralingseenheid in de array-antenne is aangepast, zal de hoofdlob stralingsas afbuigen en kan de maximale afbuiging 45° zijn. Vergeleken met de traditionele oplossing is de dekking van de phased array-gateway met behulp van de oplossing die in de onderstaande afbeelding wordt weergegeven, aanzienlijk vergroot. De oorspronkelijke 3dB stralingshoek was 30° en is nu 120° geworden.
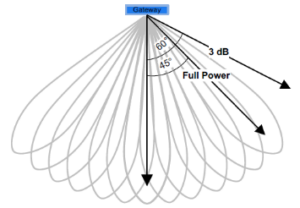
Stralingsdiagram van een phased array-antennegateway
De specifieke werking van de phased array gateway kan worden begrepen als een single-port reader die een multi-port reader wordt (hoeveel combinaties van fasen komen overeen met hoeveel poorten). De originele single-port reader kan alleen verbinding maken met één antenne en het stralingsbereik is vast, terwijl de multi-port reader verbinding kan maken met meerdere antennes en elke antenne een ander stralingsbereik heeft. Deze multi-port reader kan het te scannen gebied selecteren op basis van de behoeften en de overeenkomstige poort starten om het signaal via de overeenkomstige antenne te verzenden om het opgegeven gebied te bestrijken.
Positioneringsfunctie voor gefaseerde antenne-array
Over de positioneringsfunctie van UHF RFID-lezersNeem bijvoorbeeld twee veelgebruikte phased array gateways op de markt: Impinj's xSpan en xArray.
xArray is een vierkante phased array gateway. Wanneer de xArray op het dak hangt, is het dekkingsgebied een cirkel, met in totaal 8 sectoren en 52 stralingsgebieden. Het kan eenvoudig worden begrepen als een 52-poorts lezer die is aangesloten op 52 antennes met verschillende stralingsgebieden.
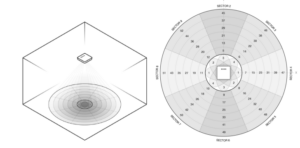
xArray-straalpatroon
xSpan is een rechthoekige phased array gateway. De xSpan gateway kan worden gezien als een vereenvoudigde versie van de xArray. Wanneer de xSpan op het dak hangt, is het gebied dat het bestrijkt een rechthoek met in totaal 13 stralingsgebieden. Het kan eenvoudig worden begrepen als een 13-poorts lezer die is aangesloten op antennes in 13 verschillende stralingsgebieden.
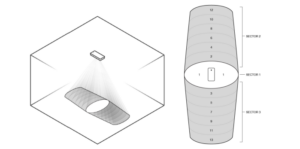
xSpan-balkpatroon
In de werkelijke omgeving overlappen de stralingsgebieden van aangrenzende nummers elkaar. Wanneer dezelfde tag wordt geïdentificeerd in meerdere genummerde stralingsgebieden, kan de specifieke locatie van de tag worden berekend door de RSSI-grootte. Het berekeningsproces is om het RSSI-verschil om te zetten in het afstandsverschil en het vervolgens te implementeren via het multi-point positioneringsalgoritme. Uiteraard zal de tag waarschijnlijk in het stralingsgebied met de grootste RSSI-waarde vallen.
De grootste functie van de phased array gateway is positionering, het beoordelen van de locatie en beweging van het object. De volgende afbeelding toont de tagbeweging die kan worden gevolgd door xSpan en xArray. Van hen kan xSpan alleen de tagbeweging in één asrichting volgen, terwijl xArray tags kan volgen die in meerdere verschillende richtingen bewegen.
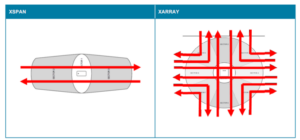
Gefaseerde array-gatewayrichtingstracking
Om realtime tracking van objecten te garanderen, is het noodzakelijk om ervoor te zorgen dat de antenneschakelsnelheid snel genoeg is. Zelfs als de schakeling elke keer 50 ms is, duurt het 2,5 s om alle stralingsgebieden van de xArray te scannen. Daarom moet bij de toepassing van objecttracking het aantal tags in het veld worden gegarandeerd. Als tracking met hoge precisie vereist is, mag het aantal tags niet meer dan 20 bedragen; als tracking met hoge snelheid moet worden bereikt, mag het aantal tags niet meer dan 50 bedragen.
Bij daadwerkelijke tests zijn er bepaalde fouten om verschillende redenen. De gemeten gegevens in een ideale omgeving zonder occlusie en reflectie zijn: er is een 85%-waarschijnlijkheidsfout binnen 1,5 meter. De fout zal groter zijn in complexe omgevingen, met name in winkels met schap- en muurreflecties, evenals de stapel- en plaatsingshoogte van tags, wat een grote impact zal hebben op de testnauwkeurigheid. Vergeleken met traditionele technologieën verbetert het gebruik van phased array gateways echter de nauwkeurigheid en het gemak van het positioneren en vinden van objecten aanzienlijk.
De optimalisatie van de positioneringsnauwkeurigheid door het onderzoeksteam van de Shanghai Jiaotong University wordt voornamelijk weerspiegeld in het algoritmeniveau. In hun oplossing moeten ze eerst de fase-informatie van het tagreflectiesignaal lezen via de reader array-antenne van fabrikanten zoals Impinj, en vervolgens het positioneringsalgoritme optimaliseren op basis van de fase-informatie.
De centimeter-niveau positioneringsnauwkeurigheid die eerder in het nieuws werd gemeld, is het effect dat werd bereikt onder relatief ideale omstandigheden. Om een dergelijke nauwkeurigheid te bereiken, zijn veel specifieke omstandigheden vereist. Als het in een algemene omgeving is, is het op basis van de optimalisatie van het algoritme een belangrijke doorbraak om de positioneringsnauwkeurigheid van de UHF RFID-positioneringsoplossing te verbeteren van ongeveer 1 meter tot decimeterniveau.
Welke scenario's zijn geschikt voor UHF RFID-positionering met hoge precisie?
De positioneringsnauwkeurigheid van UHF RFID is ongeveer 1 m, wat ook tot de categorie van zeer nauwkeurige positioneringstechnologie behoort. Op dit moment is de draadloze positioneringstechnologie met de beste positioneringsnauwkeurigheid op de markt UWB, die in een ideale omgeving een positioneringsnauwkeurigheid op centimeterniveau kan bereiken, maar in werkelijke toepassingen is het waarschijnlijk decimeterniveau; terwijl de positioneringsnauwkeurigheid van Bluetooth AoA slechts meterniveau is, en de nauwkeurigheid van Bluetooth's volgende generatie positioneringstechnologie "Channel Sounding" ook ongeveer 1 m is, dus de positioneringsnauwkeurigheid van UHF RFID is niet slecht.