UHF RFID สามารถใช้สำหรับการระบุตำแหน่งที่แม่นยำสูงได้หรือไม่
ก่อนอื่นผมขอตอบคำถามของคุณก่อน RFID UHF สามารถใช้เพื่อการระบุตำแหน่งที่แม่นยำสูง แต่ความแม่นยำจะอยู่ที่ประมาณ 1 เมตร
UHF RFID ใช้เป็นโซลูชันการจัดตำแหน่ง อุปกรณ์หลักคือเครื่องอ่านที่ใช้เสาอากาศแบบเรียงเฟส หลักการของเสาอากาศแบบเรียงเฟสอธิบายไว้โดยละเอียดในหนังสือ "UHF RFID Technology Products and Applications for the Internet of Things" ของ Gan Quan เราจะอ้างอิงเนื้อหาที่เกี่ยวข้อง
หลักการของเสาอากาศแบบอาร์เรย์เฟส
เสาอากาศแบบเรียงเฟส หรือเรียกอีกอย่างว่าเสาอากาศแบบเรียงเฟส หมายถึงเสาอากาศที่เปลี่ยนรูปร่างของรูปแบบทิศทางโดยการควบคุมเฟสการป้อนของหน่วยแผ่สัญญาณในเสาอากาศแบบเรียงเฟส การควบคุมเฟสสามารถเปลี่ยนทิศทางของค่าสูงสุดของรูปแบบทิศทางของเสาอากาศเพื่อให้บรรลุวัตถุประสงค์ของการสแกนลำแสง เข้าใจได้ง่ายๆ ว่าเสาอากาศแบบดั้งเดิมมีรูปแบบการแผ่สัญญาณคงที่เพียงรูปแบบเดียว ในขณะที่เสาอากาศแบบเรียงเฟสสามารถมีรูปแบบการแผ่สัญญาณได้หลายรูปแบบในทิศทางต่างๆ เมื่อใช้เสาอากาศแบบเรียงเฟสในความถี่สูงมาก ระบบอาร์เอฟไอดีเสาอากาศหนึ่งต้นสามารถแปลงเป็นเสาอากาศหลายต้นในทิศทางต่างๆ ได้ รูปต่อไปนี้แสดงไดอะแกรมการแผ่รังสีของเกตเวย์ที่มีเสาอากาศอาร์เรย์เฟส แกนการแผ่รังสีของกลีบหลักของเสาอากาศเดิมคือ θ=0° หลังจากปรับเฟสของหน่วยการแผ่รังสีที่ระบุในเสาอากาศอาร์เรย์แล้ว แกนการแผ่รังสีของกลีบหลักจะเบี่ยงเบน และสามารถเบี่ยงเบนสูงสุดได้ 45° เมื่อเปรียบเทียบกับโซลูชันดั้งเดิมแล้ว การครอบคลุมของเกตเวย์อาร์เรย์เฟสโดยใช้โซลูชันที่แสดงในรูปด้านล่างจะเพิ่มขึ้นอย่างมาก มุมการแผ่รังสี 3dB เดิมคือ 30° และตอนนี้กลายเป็น 120°
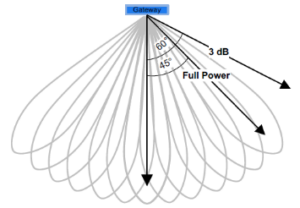
ไดอะแกรมการแผ่รังสีเกตเวย์เสาอากาศอาร์เรย์เฟส
การทำงานเฉพาะของเกตเวย์อาร์เรย์เฟสสามารถเข้าใจได้ว่าเป็นเครื่องอ่านพอร์ตเดียวที่กลายมาเป็นเครื่องอ่านพอร์ตหลายพอร์ต (จำนวนเฟสที่รวมกันสอดคล้องกับจำนวนพอร์ต) เครื่องอ่านพอร์ตเดียวเดิมสามารถเชื่อมต่อกับเสาอากาศได้เพียงเสาเดียว และช่วงการแผ่รังสีจะคงที่ ในขณะที่เครื่องอ่านพอร์ตหลายพอร์ตสามารถเชื่อมต่อกับเสาอากาศหลายเสาได้ และเสาอากาศแต่ละเสาจะมีช่วงการแผ่รังสีที่แตกต่างกัน เครื่องอ่านพอร์ตหลายพอร์ตนี้สามารถเลือกพื้นที่ที่จะสแกนตามความต้องการและเริ่มพอร์ตที่เกี่ยวข้องเพื่อส่งสัญญาณผ่านเสาอากาศที่เกี่ยวข้องเพื่อครอบคลุมพื้นที่ที่ระบุ
ฟังก์ชั่นการวางตำแหน่งเสาอากาศแบบแบ่งเฟส
เกี่ยวกับฟังก์ชั่นการระบุตำแหน่งของ UHF เครื่องอ่าน RFIDให้ใช้เกตเวย์อาร์เรย์แบบเฟสทั่วไปสองตัวในตลาด ได้แก่ xSpan และ xArray ของ Impinj เป็นตัวอย่าง
xArray คือเกตเวย์แบบแบ่งเฟสอาร์เรย์รูปสี่เหลี่ยม เมื่อแขวน xArray ไว้บนหลังคา พื้นที่ครอบคลุมจะเป็นรูปวงกลม โดยมีพื้นที่ทั้งหมด 8 เซกเตอร์และพื้นที่รับรังสี 52 พื้นที่ ซึ่งสามารถเข้าใจได้ง่ายๆ ว่าเป็นเครื่องอ่าน 52 พอร์ตที่เชื่อมต่อกับเสาอากาศ 52 เสาที่มีพื้นที่รับรังสีต่างกัน
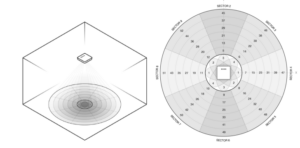
รูปแบบลำแสง xArray
xSpan คือเกตเวย์อาร์เรย์เฟสแบบสี่เหลี่ยมผืนผ้า เกตเวย์ xSpan ถือเป็นเวอร์ชันที่เรียบง่ายของ xArray เมื่อแขวน xSpan ไว้บนหลังคา พื้นที่ที่ครอบคลุมจะเป็นสี่เหลี่ยมผืนผ้าที่มีพื้นที่รับรังสีทั้งหมด 13 พื้นที่ ซึ่งสามารถเข้าใจได้ง่ายๆ ว่าเป็นเครื่องอ่าน 13 พอร์ตที่เชื่อมต่อกับเสาอากาศในพื้นที่รับรังสีที่แตกต่างกัน 13 พื้นที่
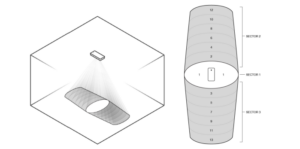
รูปแบบคาน xSpan
ในสภาพแวดล้อมจริง พื้นที่การแผ่รังสีของตัวเลขที่อยู่ติดกันจะทับซ้อนกัน เมื่อระบุแท็กเดียวกันในพื้นที่การแผ่รังสีที่มีหมายเลขหลายรายการ ตำแหน่งเฉพาะของแท็กสามารถคำนวณได้จากขนาด RSSI กระบวนการคำนวณคือการแปลงความแตกต่างของ RSSI เป็นความแตกต่างของระยะทาง จากนั้นจึงนำไปใช้ผ่านอัลกอริทึมการวางตำแหน่งหลายจุด แน่นอนว่าแท็กมีแนวโน้มที่จะตกอยู่ในพื้นที่การแผ่รังสีที่มีค่า RSSI สูงสุด
ฟังก์ชันที่ใหญ่ที่สุดของเกตเวย์แบบแบ่งเฟสคือการกำหนดตำแหน่ง ตัดสินตำแหน่งและการเคลื่อนที่ของวัตถุ รูปภาพต่อไปนี้แสดงการเคลื่อนที่ของแท็กที่ xSpan และ xArray สามารถติดตามได้ โดย xSpan สามารถติดตามการเคลื่อนที่ของแท็กในทิศทางแกนเดียวเท่านั้น ในขณะที่ xArray สามารถติดตามแท็กที่เคลื่อนที่ในทิศทางต่างๆ ได้หลายทิศทาง
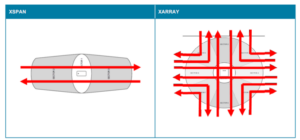
การติดตามทิศทางเกตเวย์อาร์เรย์แบบเฟส
เพื่อให้แน่ใจว่าสามารถติดตามวัตถุได้แบบเรียลไทม์ จำเป็นต้องตรวจสอบให้แน่ใจว่าความเร็วในการสลับเสาอากาศนั้นเร็วพอ แม้ว่าการสลับจะอยู่ที่ 50 มิลลิวินาทีในแต่ละครั้ง แต่ก็ใช้เวลา 2.5 วินาทีในการสแกนพื้นที่การแผ่รังสีทั้งหมดของ xArray ดังนั้น ในการใช้งานการติดตามวัตถุ ควรรับประกันจำนวนแท็กในสนาม หากจำเป็นต้องติดตามอย่างแม่นยำ จำนวนแท็กไม่ควรเกิน 20 แท็ก หากต้องการติดตามด้วยความเร็วสูง จำนวนแท็กไม่ควรเกิน 50 แท็ก
ในการทดสอบจริง มีข้อผิดพลาดบางประการเนื่องมาจากหลายสาเหตุ ข้อมูลที่วัดได้ในสภาพแวดล้อมที่เหมาะสมโดยไม่มีการบดบังและการสะท้อนกลับคือ มีข้อผิดพลาดความน่าจะเป็น 85% ในระยะ 1.5 เมตร ข้อผิดพลาดจะมากขึ้นในสภาพแวดล้อมที่ซับซ้อน โดยเฉพาะในร้านค้าปลีกที่มีการสะท้อนกลับบนชั้นวางและผนัง รวมถึงความสูงในการซ้อนและการวางแท็ก ซึ่งจะส่งผลกระทบอย่างมากต่อความแม่นยำในการทดสอบ อย่างไรก็ตาม เมื่อเปรียบเทียบกับเทคโนโลยีดั้งเดิม การใช้เกตเวย์อาร์เรย์แบบเฟสจะช่วยเพิ่มความแม่นยำและความสะดวกในการระบุตำแหน่งและค้นหาวัตถุได้อย่างมาก
การเพิ่มประสิทธิภาพความแม่นยำในการระบุตำแหน่งของทีมวิจัยของมหาวิทยาลัยเจียวทงเซี่ยงไฮ้สะท้อนให้เห็นในระดับอัลกอริทึมเป็นหลัก ในโซลูชันของพวกเขา พวกเขาต้องอ่านข้อมูลเฟสของสัญญาณสะท้อนแท็กผ่านเสาอากาศอาร์เรย์เครื่องอ่านของผู้ผลิต เช่น Impinj ก่อน จากนั้นจึงเพิ่มประสิทธิภาพอัลกอริทึมการระบุตำแหน่งตามข้อมูลเฟส
ความแม่นยำในการระบุตำแหน่งในระดับเซนติเมตรที่รายงานในข่าวก่อนหน้านี้เป็นผลที่เกิดขึ้นภายใต้เงื่อนไขที่เหมาะสม เพื่อให้ได้ความแม่นยำดังกล่าว จำเป็นต้องมีเงื่อนไขเฉพาะหลายประการ หากอยู่ในสภาพแวดล้อมทั่วไป โดยอิงตามการปรับให้เหมาะสมของอัลกอริทึม ถือเป็นความก้าวหน้าครั้งสำคัญในการปรับปรุงความแม่นยำในการระบุตำแหน่งของโซลูชันการระบุตำแหน่ง UHF RFID จากประมาณ 1 เมตรเป็นระดับเดซิเมตร
สถานการณ์ใดที่เหมาะกับการวางตำแหน่ง RFID UHF ที่มีความแม่นยำสูง
ความแม่นยำในการระบุตำแหน่งของ UHF RFID อยู่ที่ประมาณ 1 เมตร ซึ่งยังจัดอยู่ในประเภทของเทคโนโลยีการระบุตำแหน่งที่มีความแม่นยำสูงอีกด้วย ปัจจุบัน เทคโนโลยีการระบุตำแหน่งแบบไร้สายที่มีความแม่นยำในการระบุตำแหน่งที่ดีที่สุดในตลาดคือ UWB ซึ่งสามารถบรรลุความแม่นยำในการระบุตำแหน่งในระดับเซนติเมตรในสภาพแวดล้อมที่เหมาะสม แต่ในการใช้งานจริง มักจะเป็นระดับเดซิเมตร ในขณะที่ความแม่นยำในการระบุตำแหน่งของ Bluetooth AoA อยู่ที่ระดับเมตรเท่านั้น และความแม่นยำของเทคโนโลยีการระบุตำแหน่งรุ่นต่อไปของ Bluetooth “Channel Sounding” ก็อยู่ที่ประมาณ 1 เมตรเช่นกัน ดังนั้นความแม่นยำในการระบุตำแหน่งของ UHF RFID จึงไม่เลว